Biomod/2014/Sendai/temp/0829/Simulation
<html> <head> <style type="text/css">
html{
background-color: #5b2d01;
height: 100%;
} body{
background-color: #f5e4b4;
font-size: 1.4em;
font-size: 125%;
font-family:Arial,'Lucida Grande';
height: 100%;
}
figure{
margin-bottom: 10px;
} figcaption{
font-size: 14px;
}
/* hiding wikiUI*/
.firstHeading {
display:none;
}
- content{
background-color: #f5e4b4; background-image: linear-gradient(#f5e4b4,#eace7f); border-style:none; margin:0; padding-top:0px; padding-bottom:15px; padding-right:0px; padding-left:0px; min-height:600px;
}
- globalWrapper{
font-size:100%;
}
- contentSub{
display:none;
}
- column-one{
display:none;
}
- footer{
display:none;
} /*----------*/
- header{
height: 96px;
width:1000px;
margin:0 auto;
margin-top: 10px;
margin-bottom: 10px;
}
- left_header{
height: 96px; width: 96px;
float:left;
}
- homebutton {
width: 96px;
height: 96px;
float: left;
}
- homebutton li{
display: inline;
}
- homebutton li a{
float: left;
height: 0px;
width: 96px;
padding-top: 96px;
overflow-x: hidden;
overflow-y: hidden;
background-image: url(http://openwetware.org/images/0/02/Homebutton.png);
background-repeat: no-repeat;
}
- homebutton #stamp a{ background-position: 0 -96px; }
- homebutton #stamp a:hover{ background-position: 0 0; }
- homebutton.home #stamp a{ background-position: 0 0; }
- globalnav {
height: 96px; width: 808px;
float:left;
}
- globalnav li{
display: inline; }
- globalnav li a{
float: left; height: 0pt; padding-top: 96px; overflow-x: hidden; overflow-y: hidden; background-image: url(http://openwetware.org/images/e/e8/Uiparts_navigation-01.jpg); background-repeat: no-repeat; }
- globalnav #gn-home a{ width: 55px; }
- globalnav #gn-intro a{ width: 122px; }
- globalnav #gn-design a{ width: 84px; }
- globalnav #gn-simu a{ width: 118px; }
- globalnav #gn-xp a{ width: 114px; }
- globalnav #gn-protocol a{ width: 92px; }
- globalnav #gn-dis a{ width: 112px; }
- globalnav #gn-team a{ width: 78px; }
- globalnav #gn-end a{ width: 71px; }
- globalnav #gn-home a { background-position: 0 0; }
- globalnav #gn-intro a { background-position: -55px 0; }
- globalnav #gn-design a { background-position: -177px 0; }
- globalnav #gn-simu a { background-position: -261px 0; }
- globalnav #gn-xp a { background-position: -379px 0; }
- globalnav #gn-protocol a { background-position: -493px 0; }
- globalnav #gn-dis a { background-position: -585px 0; }
- globalnav #gn-team a { background-position: -697px 0; }
- globalnav #gn-end a { background-position: -775px 0; }
- globalnav #gn-home a:hover { background-position: 0 -96px; }
- globalnav #gn-intro a:hover { background-position: -55px -96px; }
- globalnav #gn-design a:hover { background-position: -177px -96px; }
- globalnav #gn-simu a:hover { background-position: -261px -96px; }
- globalnav #gn-xp a:hover { background-position: -379px -96px; }
- globalnav #gn-protocol a:hover { background-position: -493px -96px; }
- globalnav #gn-dis a:hover { background-position: -585px -96px; }
- globalnav #gn-team a:hover { background-position: -697px -96px; }
- globalnav #gn-home a:active { background-position: 0 -192px; }
- globalnav #gn-intro a:active { background-position: -55px -192px; }
- globalnav #gn-design a:active { background-position: -177px -192px; }
- globalnav #gn-simu a:active { background-position: -261px -192px; }
- globalnav #gn-xp a:active { background-position: -379px -192px; }
- globalnav #gn-protocol a:active { background-position: -493px -192px; }
- globalnav #gn-dis a:active { background-position: -585px -192px; }
- globalnav #gn-team a:active { background-position: -697px -192px; }
- globalnav.home #gn-home a { background-position: 0 -288px; }
- globalnav.intro #gn-intro a { background-position: -55px -288px; }
- globalnav.design #gn-design a { background-position: -177px -288px; }
- globalnav.simu #gn-simu a { background-position: -261px -288px; }
- globalnav.xp #gn-xp a { background-position: -379px -288px; }
- globalnav.protocol #gn-protocol a { background-position: -493px -288px; }
- globalnav.dis #gn-dis a { background-position: -585px -288px; }
- globalnav.team #gn-team a { background-position: -697px -288px; }
- wikiwrapper{
width: 980px;
background-color: #fffcf5;
}
- mainvisual{
width: 980px;
margin-left: auto;
margin-right: auto;
text-align: center;
}
- main{
width: 980px;
min-height: 600px;
background-color: #fffcf5;
padding-right: 15px;
padding-left: 15px;
padding-bottom: 150px;
margin-right: auto;
margin-left: auto;
text-align: justify;
font-size: 110%;
}
p{
text-indent:1em;
}
/*テーブルの色づけ*/
table.table tr:nth-child(odd) {
/* 奇数行の背景色を設定します。 */ background-color: #ecf6fb;
} table.table tr:nth-child(even) {
/* 偶数行の背景色を設定します。 */ background-color: #ffffff;
}
.overline{
text-decolation: overline;
}
/*simulationページの段組みコンテナ*/
- container {
width: 100%;
height: auto;
height: 100%;
min-height: 100%;
}
div.blockleft{
float: left;
width: 625px;
height: 475px;
} div.blockright{
float:right;
width: 355px;
height: 490px;
div.blockleft2{
float: left;
width: 450px;
height: 475px;
} div.blockright2{
float:right;
width: 450px;
height: 475px;
} div.block{
width:980px;
height: 475px;
margin-bottom: 20px;
}
p.textbox{
padding:20px;
}
div.blockright span{
vertical-align: middle;
}
- new_footer{
margin-top:30px;
padding-top:15px; width:100%; height:100px; background-color:#5b2d01; color:#fff;
font-size: 125%;
position: absolute;
bottom: 0;
display: inline;
}
.lefttext{
height:auto;
width:30%;
padding-left:20%;
float:left;
}
.rightimg{
height:auto;
width:30%;
padding-left:20%;
}
</style> </head> </html> <html> <head> <title></title> </head>
<body>
Simulation
<a href="#approach1">1st Approach: Enzyme system</a>
<a href="#approach2">2nd Approach; Enzyme-free System</a>
1st Approach: Enzyme system
Results
In our system, as the number of combinations among DNAs is so large, there are a lot of intermediates that are not the major product. We have to confirm that the effects of the products are negligible in our system. Searching for an optimum condition to realize the system is not a simple task because the combination of intermediates and reactions among them is too large to take into considerations. To solve these problems, we check the behaviors by simulation. The optimum condition can be applied to experimental conditions. We wrote out all the reaction formulas in the system, and then made ordinary differential equations. Simulations were implemented by solving the equations by numerical computation software. Details are shown in a <a href="#method">Method section</a>.
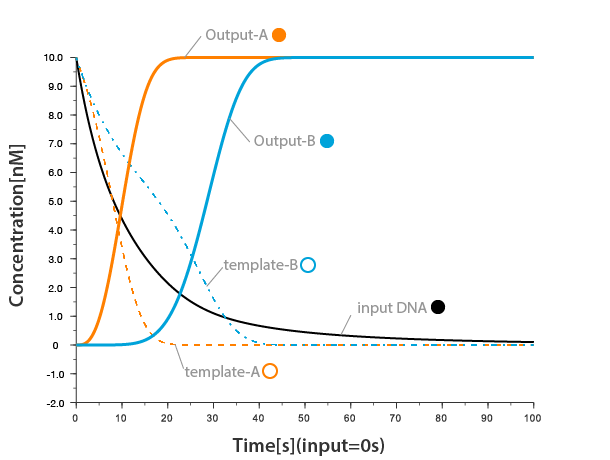
<figure> <img src="http://openwetware.org/images/4/44/0823tetsuya-01.png"> <figcaption>Fig.1 Result of simulation when the system accepted A-B input.</figcaption> </figure>
First, we give an A-B input to the system. Here A-B means the input has commands that give A-output and then B-output.
The result of simulation is shown in Fig.1. The horizontal axis is time [sec], and the vertical axis is concentration [nM].In Fig.1, the input is mixed at 0[sec]. As a result, the concentration of output-A increases until about 20[sec]. After that, the output-B is released until about 50[sec].
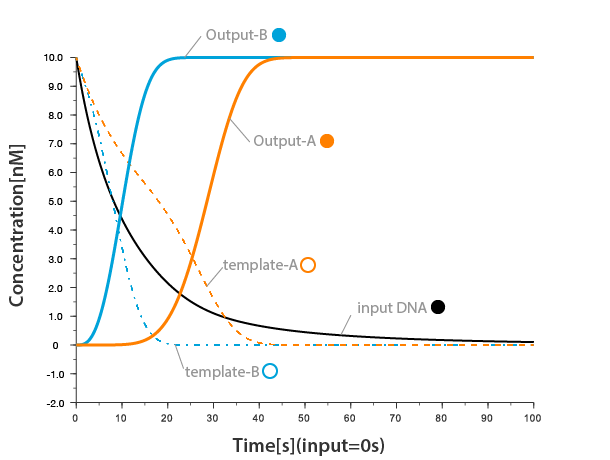
These results above show that the system works properly in the mathematical model. We further check the programmability of our system. The programmability is whether the system works accurately, whatever information is coded in the input DNA. We simulate how the system works when it accepts B-A input. If our design is appropriate, the system will give B-output then A-output.
<figure> <img src="http://openwetware.org/images/c/c3/0823tetsuya_gyaku-01.png"> <figcaption>Fig.2 Result of simulation when the system accepted B-A input.</figcaption> </figure>
In the simulation, we get the result as we expected (Fig.2).
This proves our system can recognize the input DNA and change its outputs as we designed. In other words, it shows that our system is programmable.
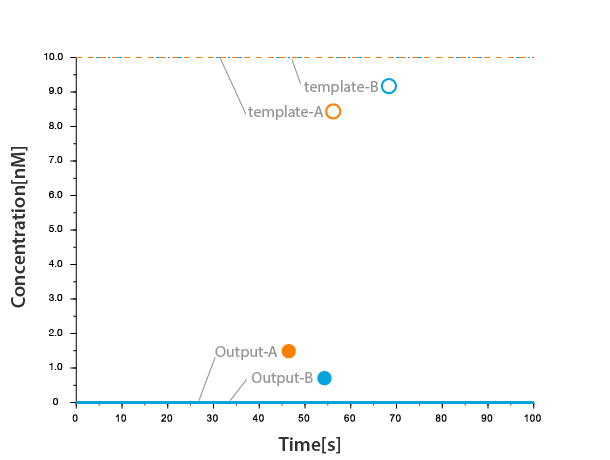
<figure> <img src="http://openwetware.org/images/3/3e/Ab%28インプットなし%29-01.png"> <figcaption>Fig.3 Result of simulation when the system accepted no input.</figcaption> </figure>
As a control experiment, we simulate the system without input, which gives no outputs (Fig.3).
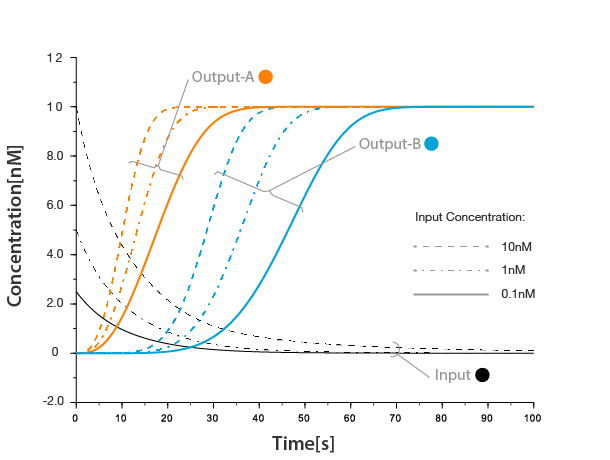
In terms of giving outputs in order, time intervals are the important elements. To control our system more precisely, we investigated the relations between time intervals and the concentration of input, templates, and gates. As each concentration affects the system, we check the time intervals when the concentration of component is changed. When concentration of input, templates, gates are changed (Fig.4,5,6,7,8), the results come out as follows. Each result shows that time interval can be adjusted by changing the concentration of components. Decrease in the concentration of inputs or templates delays the releasing time of outputs, because the reactions of input and templates produce Key DNA, which produces outputs (Fig.4,5,8). Decrease in the concentration of GateA delays the releasing time of B-output, because GateA and Key DNA-A start “renewing process”(Fig.6). As for GateB, the result is the same (Fig.7).
<img src="http://openwetware.org/images/5/59/0824simulation04-01.png" width="480px" height="362px">
<img src="http://openwetware.org/images/e/e7/0824simulation03-01.png" width="480px" height="362px">
Fig.4 Result of simulation when concentration of template-A is changed. Fig.5 Result of simulation when concentration of template-B is changed.
<img src="http://openwetware.org/images/9/91/0827simulation08-01.png" width="480px" height="362px">
<img src="http://openwetware.org/images/c/cf/0827simulation09-01.png" width="480px" height="362px">
Fig.6 Result of simulation when concentration of gate-A is changed. Fig.7 Result of simulation when concentration of gate-B is changed.
<img src="http://openwetware.org/images/6/6e/0824simulation05-01.png" width="480px" height="362px">
Fig.8 Result of simulation when concentration of input is changed.
The result of simulation shows that our system can be controlled in terms of order and time intervals. We conclude that
・Our system gives outputs in order that is coded in the input DNA.
・Our system gives outputs with time intervals and the interval can be arranged by changing the concentrations of the components.
Method
Our system is described by differential equations obtained from chemical reaction formulas.
<img src="http://openwetware.org/images/b/b8/Dx-01.png">
We solved them by using numerical software (Scilab).
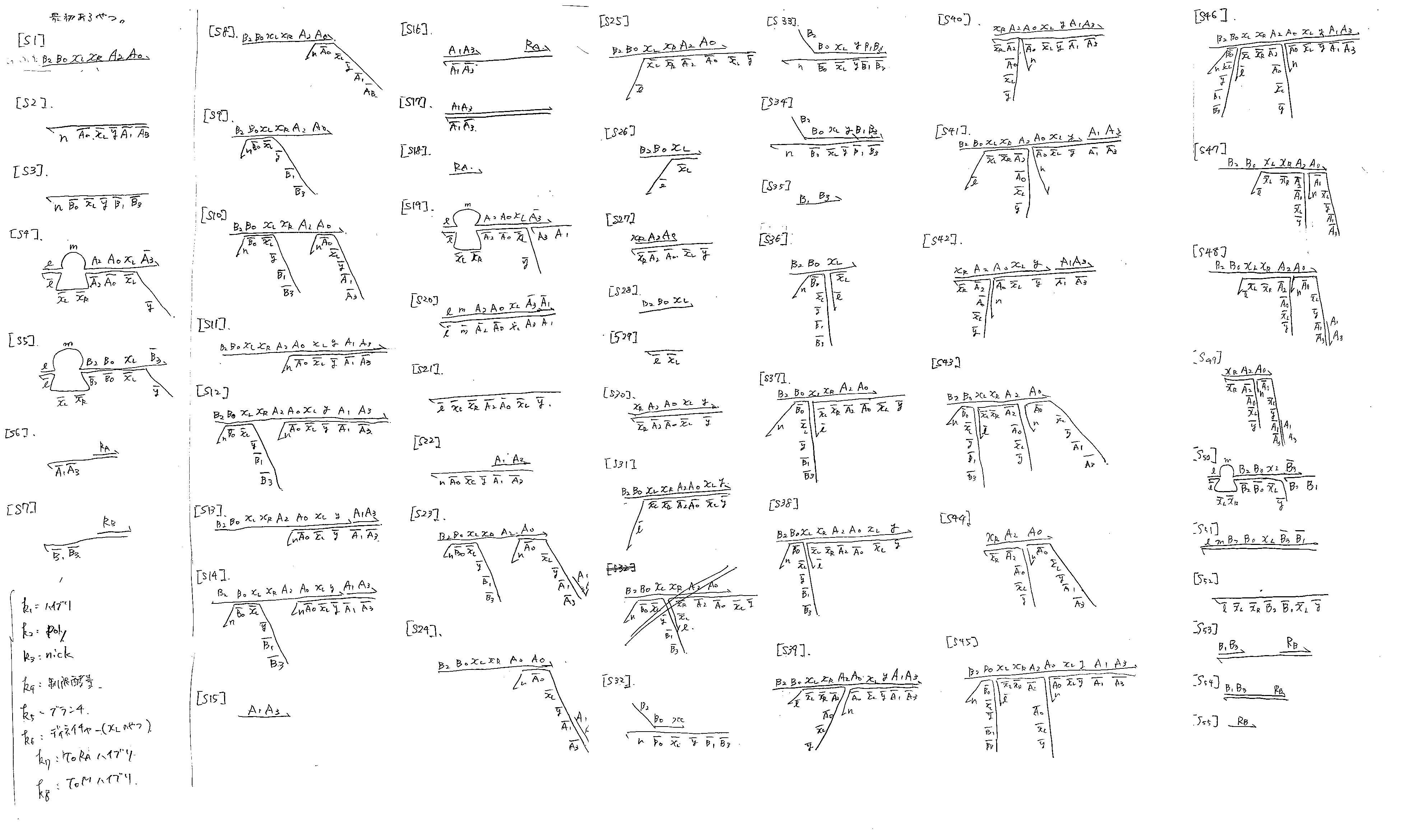
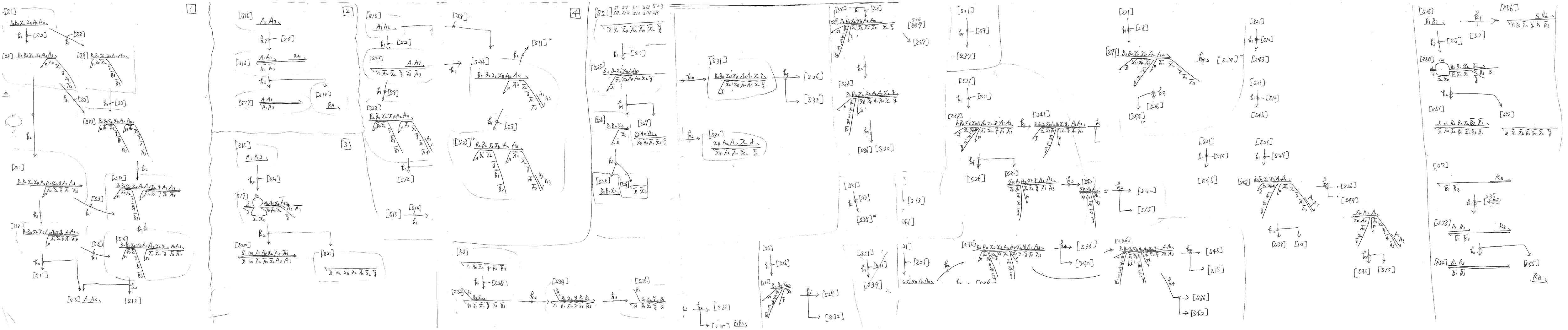
All reactions in our system are shown in <a href="http://openwetware.org/images/c/cc/Scan1.jpg">Fig. 9.1</a>,<a href="http://openwetware.org/images/b/bc/Scan2.jpg">Fig. 9.2</a>
Source file used in calculations is as follows.<a href="http://openwetware.org/images/9/98/Source.txt">(Source File)</a>
Condition
Condition of simulating is as follows.
| Input DNA concentration: | 10nM |
| Template1 concentration: | 10nM |
| Template2 concentration: | 10nM |
| Liposome1 concentration: | 10nM |
| Liposome2 concentration: | 10nM |
| Gate1 concentration: | 10nM |
| Gate2 concentration: | 10nM |
| Simulation time: | 100[sec] |
Values of chemical parameters are as follows.
| Hybridization: | kh=5.0×106 |
| Denaturation: | kd=1.0×103 |
| Branch migration: | kb=1.0×10-1 |
| Polymerase: | kp=17 |
| Nickase: | kn=3.0 |
| Restriction enzyme: | kr=3.0 |
[1] David Yu Zhang et al. 2009
[2] Kelvin Montagne et al. 2010
2nd Approach; Enzyme-free System
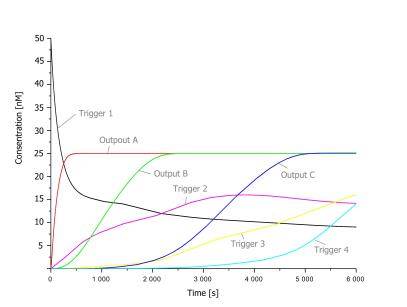
For same reasons as Enzyme system, we also simulated the Enzyme-free system.
<img src="http://openwetware.org/images/d/df/Sim.Fig1.jpg" width="407" heigt="307px">
<figcaption>Fig.10 Result of simulation when the system accepted A-B input
</figcaption>
First, we give an A-B input to the system. Result of simulation is shown in Fig.10. Here first, output-A increased until about 400[sec] then output-B released until2000[sec]. These results above show that the system works properly in the mathematical model then we give a B-A input to the system.
<img src="http://openwetware.org/images/0/01/Sim.Fig2.jpg">
<figcaption>Fig.11 Result of simulation when the system accepted B-A input
</figcaption>
In the simulation, output-B increased until about 400[sec] then output-A released until2000 [sec]. This proves our system can recognize input DNA and change its outputs as we coded.
<img src="http://openwetware.org/images/1/1d/Sim.Fig3.jpg">
<figcaption>Fig.12 Result of simulation when the system accepted no input.
</figcaption>
As a control experiment, we simulate the system without input, which gives no output. These results show this system is programmable.
Next, we check the behavior when we give A-B-C input to check whether this system is scalable. If our design is appropriate, the system will give A-output then B-output then C-output.
<img src="http://openwetware.org/images/6/65/Sim.Fig4.jpg">
<figcaption>Fig.13 Result of simulation when the system accepted A-B-C input
</figcaption>
In the simulation when A-B-C input is mixed to the system, the system gave outputs as we expected. As a result, we confirmed that the system is sacalable.
In terms of giving outputs in order, time intervals are important element. For that reason, we wanted to know the relations of time intervals between concentration of input, trigger, fuels, and gates to control the system more precisely. Each concentration related to the system, thus we checked the behavior of time intervals when the concentrations of each component are changed
When concentration of input, gates, fuels were changed (Fig.14-17), the results came out as follows. Each result shows that time interval can be adjusted by concentration of components.
<img src="http://openwetware.org/images/f/f7/Sim.Fig5.jpg">
<figcaption>Fig.14 Result of simulation when concentration of input is changed
</figcaption>
All the production speeds of Liposome A, B, and C also changed.
<img src="http://openwetware.org/images/1/14/Sim.Fig6.jpg">
<figcaption>Fig.15 Result of simulation when concentration of Gate A is changed
</figcaption>
Only the timing of reactions after reactions related to Gate A changed.
<img src="http://openwetware.org/images/5/54/Sim.Fig7.jpg">
<figcaption>Fig.16 Result of simulation when concentration of Gate A, B is changed
</figcaption>
This figure shows that the timing of reactions after reactions related to Gate A and B can be changed by controlling the concentration of Gate A and B.
<img src="http://openwetware.org/images/c/cb/Sim.Fig8.jpg">
<figcaption>Fig.17 Result of simulation when concentration of fuel A is changed
</figcaption>
Reduction speeds didn`t change so much.
In the simulations, the system can be controlled from perspective of order and time intervals. We conclude followings.
- Our system gives outputs as coded in the input DNA in order.
- Our system gives outputs with time intervals and the interval can be arranged by changing concentrations of the components of the system.
- Our system gives A-B outputs B-A outputs and A-B-C output. Accordingly, our system is inductively scalable.
Method
Our system is described by differential equations obtained from chemical reaction formulas.
We solved them by using numerical software (Scilab).
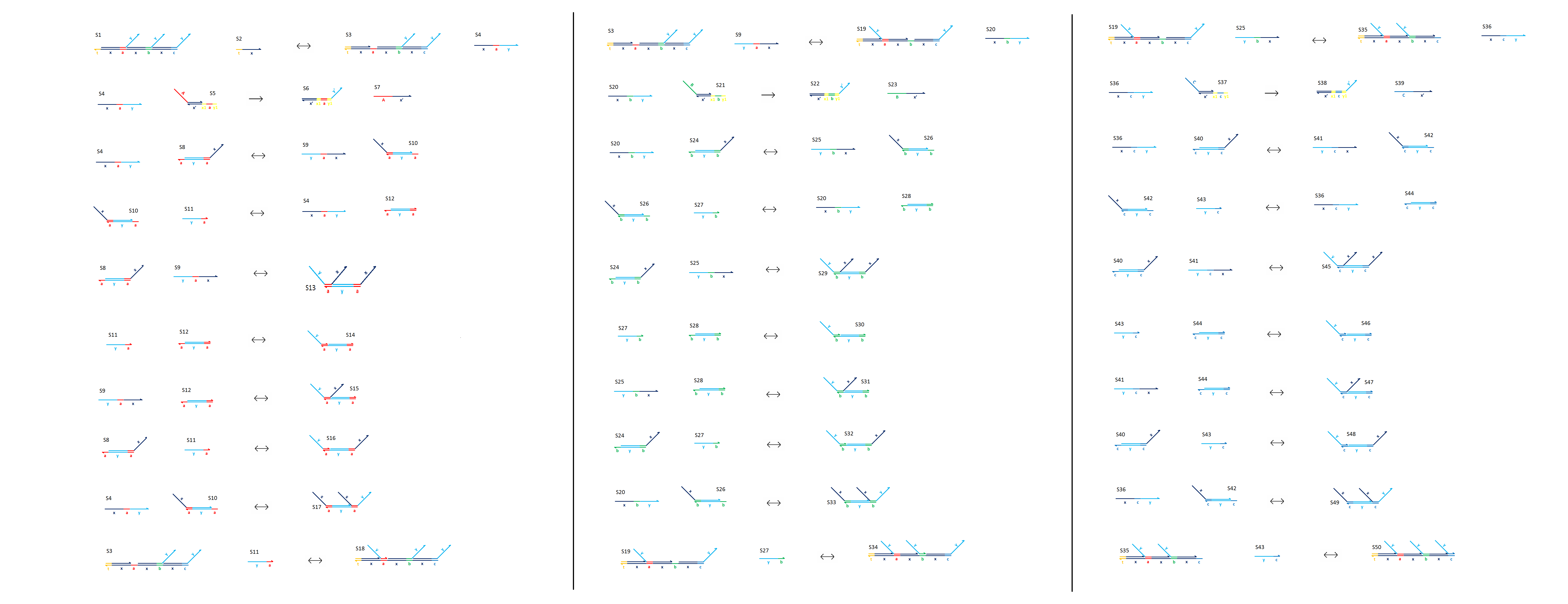
All reaction in our system are shown in
<a href="http://openwetware.org/images/8/8c/Reactions.png" target="_blank">Fig.19</a>
Source file used in calculations is as follows.
<a href="http://openwetware.org/images/a/ac/Sci_SourceCode_th_100nM.txt" target="_blank">(Source File)</a>
CONDITION
Condition of simulating is as follows
| Input concentration: | 100nM |
| Trigger concentration: | 100nM |
| Gate A, B, C concentration: | 100nM |
| LiposomeA,B,C concentration: | 50nM |
| Fuel A,B,C concentration: | 200nM |
| Simulation time: | 6000[sec] |
Values of chemical parameters are as follows [3]
| Seesawing reactions : | ks=5.0×104 [M-1s-1] |
| Toehold binding reactions : | kf=2.0×106 [M-1s-1] |
| Toehold binding reactions : | krf=10 [s-1] |
[3] Lulu Qian, Erik Winfree: Supporting Online Material for “Scaling Up Digital Circuit Computation with DNA Strand Displacement Cascades”, Science, 332, 1196--1201, 2011
(C)Copyright Biomod 2014 Team Sendai
E-MAIL:<a href="mailto:teamsendai2014@gmail.com">teamsendai2014@gmail.com</a>
<a href="http://www.molbot.mech.tohoku.ac.jp/index.html"> <img src="http://openwetware.org/images/f/f3/Muratalab-icon2_dark-01.png" width="200" alt="Molcular Robotics Lab"></a>
</body> </html>

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}