Biomod/2014/Kyutech/Introduction
<html> <head> <meta charset="utf-8"> <title>BIOMOD2014</title> <style type="text/css"> </style>
<script>var __adobewebfontsappname__="dreamweaver"</script><script src="http://use.edgefonts.net/source-sans-pro:n6:default.js" type="text/javascript"></script>
</head>
<body>
<header id="top">
<nav id="mainnav">
- <a href="/wiki/Biomod/2014/Kyutech">TOP</a>
- <a href="/wiki/Biomod/2014/Kyutech/Introduction">INTRODUCTION</a>
- <a href="/wiki/Biomod/2014/Kyutech/Design">DESIGN</a>
- <a href="/wiki/Biomod/2014/Kyutech/Experiment">EXPERIMENT</a>
- <a href="/wiki/Biomod/2014/Kyutech/Reference">REFERENCE</a>
- <a href="/wiki/Biomod/2014/Kyutech/Team">TEAM</a>
- <a href="/wiki/Biomod/2014/Kyutech/Sponsors">SPONSORS</a>
</nav> </header> <article id="main">
INTRODUCTION
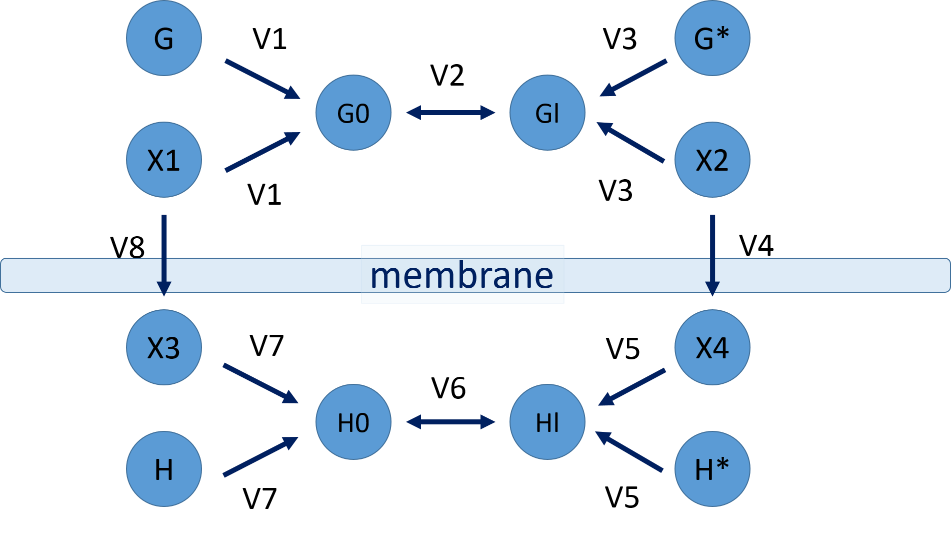
The role of the controller is to match controlled variable of the robot to the target value. Therefore, it is necessary to calculate the deviation from the target value to current controlled variable of robot by feedback. As a controller for molecular robot, we consider the following Fig.1 model this time. Molecule of X1 changes to X2, and each molecules to pass through the membrane. Also, in the membrane, molecule of X4 changes to X3, but molecule of X4 and X2 are the same. Similarly, molecule of X3 and X1 are the same.
<figure> <img src="http://openwetware.org/images/6/6c/Controller_2014kyutech_Introduction.png"width="500" height="266" alt=""/> <figcaption>Fig.1 Considered model </figcaption> </figure>
Next, we show the model has been rewritten in the DNA strand displacement reaction in Fig.2.
<figure>
<img src="http://openwetware.org/images/3/34/Dnareaction_2014kyutech_introduction.png"width="700" height="400" alt=""/>
<figcaption>Fig.2 DNA strand displacement reaction model</figcaption>
</figure>
For the sake of clarity, We have expressed succinctly this reaction model and show in Fig.3
<figure> <img src="http://openwetware.org/images/0/03/Dnareaction2_2014kyutech_introduction.png"width="700" height="400" alt=""/> <figcaption>Fig.3 Concise model</figcaption> </figure>
We certify that this model in Fig.3 is functioning as a feedback controller.
<figure> <img src="http://openwetware.org/images/5/5a/Shoumei_2014kyutech_introduction.png"width="900" height="700" alt=""/> </figure>
SIMULATION
<figure> <img src="http://openwetware.org/images/d/d6/Simu_2014kyutech_introduction.png"width="700" height="600" alt=""/> <figcaption>Fig.4 Simulation result</figcaption> </figure>
In the simulation, we set the target value to 1.7[nM]. If proposed model plays the role of controller well, output X4 ought to fit closely with target value. From the simulation result, Fig.4 shows that the value of X4 becomes the target value(=1.7[nM]) at the steady state. Also, the graph Xp shows that input Xp works to X4 reaches the target value. Therefore, our proposed model have demonstrated that theoretically functions as a controller.
</article> <aside id="sideber">
</aside> <footer>
BIOMOD 2014
</footer>
</body> </html>

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}