Biomod/2014/Kyutech/Experiment
<html> <head> <meta charset="utf-8"> <title>BIOMOD2014</title> <style type="text/css"> </style>
<script>var __adobewebfontsappname__="dreamweaver"</script><script src="http://use.edgefonts.net/source-sans-pro:n6:default.js" type="text/javascript"></script>
</head>
<body>
<header id="top">
<nav id="mainnav">
- <a href="/wiki/Biomod/2014/Kyutech">TOP</a>
- <a href="/wiki/Biomod/2014/Kyutech/Introduction">INTRODUCTION</a>
- <a href="/wiki/Biomod/2014/Kyutech/Design">DESIGN</a>
- <a href="/wiki/Biomod/2014/Kyutech/Experiment">EXPERIMENT</a>
- <a href="/wiki/Biomod/2014/Kyutech/Reference">REFERENCE</a>
- <a href="/wiki/Biomod/2014/Kyutech/Team">TEAM</a>
- <a href="/wiki/Biomod/2014/Kyutech/Sponsors">SPONSORS</a>
</nav> </header> <article id="main">
EXPERIMENT
Robot Group
Experimental purposes
Theory team have proposed a controller design method for molecular robot.
This is the same calculated results as a controller design method that been used engineering. However, it is the same calculation, but the reality of two very different this. Therefore, we were wondering about whether controller design method for molecular robot or to work with a robot engineering.
In this experiment, we constructed a Lego robot to use the concept of controller design method for molecular robot, and we constructed a Lego robot using engineering controller design method. We were experimenting with speed control compared in these two.
Experiment description
Was proposed in this paper, the controller design method for molecular robot to match the target value to the amount of control. This work is integral control in engineering controller design method. Originally, design method of engineering controller is configured with proportional control and integral control with derivative control. In this experiment, for comparison on the same performance, design method of engineering controller was constructed with only the integral control.
Laboratory instrument
1. Car models made from Lego Mindstorms NXT
Lego Mindstorms NXT is a programmable robotics kit. The main component in the kit is a brick-shaped computer. It can take input from up to four sensors and control up to three motors. The models of the car is carried one rotation sensor and one DC motor.
2. DamperIn this experiment, the damper is used by the reappearance of the concept of controller design method for molecular robot. A damper is a device that deadens, restrains, or depresses.
3. The Loading platform model made from LEGO
It is used by the reappearance of the concept of controller design method for molecular robot. This model is carried one rotation motor.
Lego robot using engineering controller design method
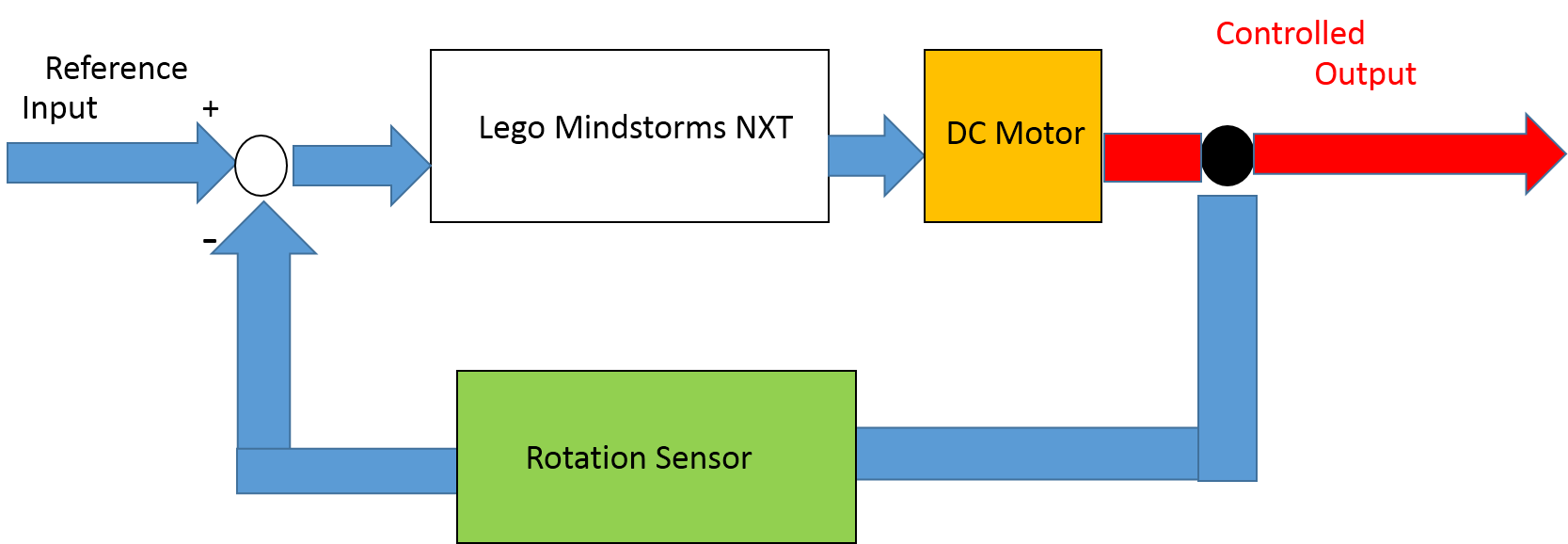
Fig.1 shows the engineering controller system design method.
<figure>
<img src="http://openwetware.org/images/8/84/Fig1_2014kyutech_experiment.png"width="600" height="300" alt=""/>
<figcaption>Fig.1 .Feedback Control System Block Diagram</figcaption>
</figure>
Below is the explanation for speed control.
First, reference input that the value is a speed of meter per second applies to the summing point of the control system. Next, Lego Mindstorms NXT calculates the correction amount by integration, and controls DC motor’s speed. Next, rotation sensor measures the present speed. Later, the value applies to the summing point. By the action above repeat, the explanation for speed control be realized.
<figure> <img src="http://openwetware.org/images/8/8c/Robot1_2014kyutech_experiment.jpg"width="500" height="300" alt=""/> <figcaption>Fig.2. Photo of completed Lego robot using engineering controller design method</figcaption> </figure>
Lego robot to use the concept of controller design method for molecular robot
We show how to build in the engineering part the concept of controller design method for molecular robot. Theory team showed, integral control part of the controller design method for molecular robot shown in the following figure3.
<figure>
<img src="http://openwetware.org/images/d/d7/Robot2_2014kyutech_experiment.png"width="400" height="300" alt=""/>
<figcaption>Fig.3. integral control part</figcaption>
</figure>
Physical quantities X1 is converted in the reaction rate of V1 to X2, and X2 is converted in the reaction rate of V2 to X4. X4 is the same physical quantity as X2. Physical quantities X4 converted in the reaction rate of V2 to X2, and X4 converted in the reaction rate of V3 to X3. X4 is a control object in this figure. Robot team was noted that this series of flow is in the integral control.
We changed the physical quantity suitable for controlling the speed into this series of flows, and we have built with Lego robot this idea. We show below this model
<figure> <img src="http://openwetware.org/images/2/23/Robot3_2014kyutech_experiment.png"width="500" height="240" alt=""/> <figcaption>Fig.4. model</figcaption> </figure>
We rewrite the model described above to the model, as shown in Fig.3, and shown in the following figure5.
<figure>
<img src="http://openwetware.org/images/3/3f/Robot4_2014kyutech_experiment.png"width="400" height="300" alt=""/>
<figcaption>Fig.5. After conversion figure</figcaption>
</figure>
In the model of Fig.3, only the Power source continues giving constant power. Constant power is generated from X1.Power source to drive the control object through the damper. In this experiment, X4[cm/sec] is a subject to be compared with the Lego robot using engineering controller design method speed.
<figure>
<img src="http://openwetware.org/images/f/f0/Robot5_2014kyutech_experiment.jpg"width="500" height="300" alt=""/>
<figcaption>Fig.6.Lego robot photo that reproduces the model Fig.4</figcaption>
</figure>
Results
1. On a smooth road
For integrate control, output falls into disorder as a result of a parameter increase. So, we executed two experiments that changed the parameter.
Part1: When the parameter is made small.
Figure7 shows the part’s 1-model results.
<figure> <img src="http://openwetware.org/images/4/49/A1_2014kyutech_experiment.png"width="500" height="300" alt=""/> <figcaption>Fig.7. The part’s 1-model results</figcaption> </figure>
In this experiment, desired value is 15[cm/sec].
The output is approaching the desired value gently, vibrating.
<figure>
<iframe width="560" height="315" src="//www.youtube.com/embed/-kK2dnecbio" frameborder="0" allowfullscreen></iframe>
<figcaption>Part1 experimental video</figcaption>
</figure>
Part2: When the parameter is made large.
Figure8 shows the part’s 2-model results.
<figure>
<img src="http://openwetware.org/images/7/70/A2_2014kyutech_experiment.png"width="500" height="300" alt=""/>
<figcaption>Fig.8. The part’s 2-model results</figcaption>
</figure>
In this experiment, desired value is 15[cm/sec].
The output is vibrating violently first. But, when time passes, it turns out that it is converging on the steady value.
<figure> <iframe width="560" height="315" src="//www.youtube.com/embed/ohz9f5mvMyg" frameborder="0" allowfullscreen></iframe> <figcaption>Part2 experimental video</figcaption> </figure>
Change of the parameter in integral control is directly reflected in the amount of corrections of a deviation. The amount of corrections, which far exceeds a desired value, is calculated by integration. But, while both vibrate, it turns out that it is converging on the steady value.
2. On a sloping road
Figure9 shows the experiment results.
<figure>
<img src="http://openwetware.org/images/3/38/A3_2014kyutech_experiment.png"width="500" height="300" alt=""/>
<figcaption>Fig.9.The experiment results</figcaption>
</figure>
<figure> <iframe width="560" height="315" src="//www.youtube.com/embed/a-KhwIXRuDM" frameborder="0" allowfullscreen></iframe> <figcaption>On a sloping road experimental video</figcaption> </figure>
When it goes to a slope from a flat way, since the disturbance by an inclination occurs into the frame, an output is confused temporarily. In Figure9, since it is coming to the slope from the neighborhood for 7 seconds, the output is confused greatly. But, when time passes, it turns out that it is converging on the steady value.
</article> <aside id="sideber">
</aside> <footer>
BIOMOD 2014
</footer>
</body> </html>

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}