Biomod/2012/UTokyo/KaseiRunners/Project
<html> <head> <style>
- column-one { display:none; width:0px;}
.container{background-color: #ffffff; margin-top:0px} .OWWNBcpCurrentDateFilled {display: none;}
- content { width: 0px; margin: 0 auto auto 0; padding: 0em 0em 0em 0em; align: center;}
- column-content {width: 0px; float: left; margin: 0 0 0 0;padding: 0;}
.firstHeading {display:none; width:0px;}
- globalWrapper{width:848px; background-color: #ffffff; margin-left: auto; margin-right: auto}
- column-one {display:none; width:0px;background-color: #ffffff;}
- content{ margin: 0 0 0 0; align: center; padding: 12px 12px 12px 12px; width: 824px;background-color: #ffff; border: 0;}
- bodyContent{ width: 800px; align: center; background-color: #ffffff;}
- column-content{width: 824px;background-color: #ffff;}
- footer{position: center; width: 848px}
@media screen {
body { background: #F5F5F5 0 0 no-repeat; /* changed default background */ }
} /*************************
テンプレ
- /
ul.menu, ul.menu li, ul.menu li ul, ul.menu li ul li .others{ margin: 0; padding: 0; background: none; font-style: normal; font-weight:100; font-size: 180%; text-align: left; list-style: none; zoom: 1; } ul.menu li, ul.menu li ul, ul.menu li ul li { font-size: 100%; } ul.menu a{ color: #FFF; text-decoration: none; } ul.menu a:link, ul.menu a:visited { background: #002040; } ul.menu a:hover, ul.menu a:active { background: #204060; }
ul.menu li { float: left; position: relative; margin: 0; } ul.menu li a { display: block; width: 160px; text-align: center; line-height: 170%; } ul.menu li ul.result li a{ text-align: left; } ul.menu li ul.result li{ } ul.menu li ul li { float: none; margin: 0;
}
ul.menu li ul { display: none; }
ul.menu li:hover ul { display: block; position: absolute; z-index: 100; } ul.menu a.others{
background: #002040;
} .maintitle{
font-size:250%; line-height:150%; font-weight:900; margin:0;
} .resultttt{ white-space: pre-wrap; } </style> </head> <body>
<img src="http://openwetware.org/images/d/df/Top_rogo_kasei.jpg" width=800px height=100px>
</body> </html>
<html> <head> <style> p.paragraph{ font-size :130%; line-heoght:100%; font-weight:normal; margin:0 20px; } h1.title a{
display: block; text-decoration: none; color: #000;
} h1.title{ margin-top:20px; } h2.title, h1.title{
clear:right;
} h2{font-weight: bold;} ul.goal{
list-style: none;
} ul.list{
border: 2px solid black; list-style: none; width: 160px;
} ul.list li{margin:5px 10px} ul.list li a{ display: block;
color: #000;
} div{line-height:100%;} </style> </head> <body>
Project
-
CONTENTS
- <a href="#goal"> 1.Goal</a>
- <a href="#background"> 2.Background</a>
- <a href="#idea"> 3.IDea</a>
- <a href="#future"> 4.Future</a>
<a name="goal">1. Goal</a>
<img src="http://openwetware.org/images/7/7d/Goal_switch.png" width=400 height=210 style="float:right">
Our goal is to make an autonomous nano-transporter.
1. No cargo, no transport.
2. With cargo, run!
<a name="background"> 2.BACKGROUND</a>
<img src="http://openwetware.org/images/d/db/Background_2.png" width=530 height=250 style="float:center">
In the nanoscale reaction, saving the material is a key issue, as the material resources are limited. To achieve a lean system, we took a method inspired by nature[1-5]. In the living cell, materials are produced on demand and transported to the place, where these materials work. To take these advantages, we challenged to make an autonomous nano-transporter using motor protein kinesin. Kinesin has two heads and walks along microtubules took out word using energy derived from ATP.
However, without any regulation system, cargo-less kinesin waste the resources (e.g. ATP and kinesin itself). So, we set our goal to construct a nano-transporter having a control system. Recent progress in DNA nanotechnology allows us to design the nano-structure transforming its shape. Using the conformation change of DNA nano structure, we plan to control on demand protein production, and transport activity of nano-transporter.
<a name="idea">3.IDEA</a>
<img src="http://openwetware.org/images/c/cf/Idea_3.png" width="397" height="268" style="float:right">
Our idea is composed of 5 processes.
1. Trigger opens DNA structure.
2. PURE system synthesizes kinesin from template DNA.
3. Cargo is attached to the DNA structure.
4. Kinesins bind the DNA structure.
5. The whole structure walks along the microtubule.
3-1. Trigger opens the DNA structure.
<img src="http://openwetware.org/images/3/39/Wiki_idea1.png" width="750" height="230" style="float:center">
Staple strands and another staple with long double-stranded DNA chain (template DNA) assemble in 6 pole cylinder-shaped structure (DNA-tube). This tube has 4 toeholds in its side, which enable to open the tube by addition of the key strands complementary to the toeholds. Template DNA appears from the cylinder.
3-2. Protein is synthesized from dsDNA by PURE system.
<img src="http://openwetware.org/images/7/74/Wiki_idea2.png" width="365" height="407" style="float:right">
PURE system synthesizes protein according to the sequence of the dsDNA released from DNA tube. The PURE system is a cell-free protein synthesizing system including RNA polymerase, ribosome, t-RNA and amino acids. These components coordinately perform transcription, translation and aminoacylation with less complex interactions than found in a whole cell. The desired protein (kinesin) is synthesized from the coding region of the dsDNA.
3-3. Combine cargo to the DNA tube.
<img src="http://openwetware.org/images/8/85/Kasei_idea3.png" width="196" height="211" style="float:right">
Beads with NeutrAvidin (NA) are used as model cargoes. While there are no singals (key DNA in our project), the tube can't bind to the cargo. Therefore the tube will diffuse in the solution. Once the signal binds to the tube occurs. Then the conformational change of the tube is occured. And the hidden biotin appeared, allowing the tube to bind to the cargo (beads) through biotin - avidin interaction.
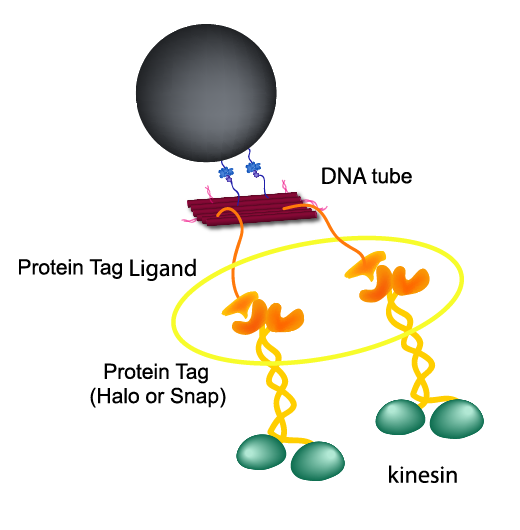
3-4. Kinesins bind to the DNA structure.
<img src="http://openwetware.org/images/3/3e/Wiki_idea4.png" width="294" height="318" style="float:right"> <img src="http://openwetware.org/images/3/39/Wiki_idea4_2nd.png" width="294" height="170" style="float:right">
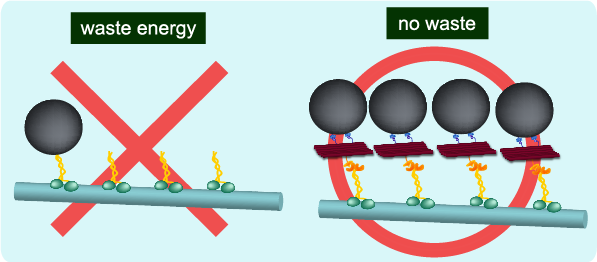
Halo- or SNAP-protein on the tail of kinesins binds to Snap-Tag ligands on the DNA tile, creating the DNA-kinesin conjugate. Kinesins can transport the cargo on the DNA tube.
DNA structure works well to keep kinesins in line, otherwise they are attached to the cargo randomly. This regulation leads to the kinesins walking toward the same direction.
Furthermore, this DNA-Kinesin conjugate can be switched on by the cargo binding. Once cargoes are attached, it starts to walk on microtubule filament.
3-5. DNA-kinesin nano-robot transports the specified cargo to destination.
<img src="http://openwetware.org/images/4/44/Wiki_idea5.png" width="389" height="390" style="float:right">
Regulated movement of the nano-robot enables lean transport.
<a name="future">4.FUTURE</a>
<img src="http://openwetware.org/images/5/5b/Future.jpg" width="400" height="312" style="float:right">
In the future, nano-medical devices will check our health and cure diseases. DNA runner may work in such nano-medical device. For more information, watch our YouTube.
1 Hess H. and Vogel V., Molecular shuttles based on motor proteins:
active transport in synthetic environments. Rev. Mol. Biotechnol, 82,
67-85 (2001)
2.Nitta T and Hess H. Dispersion in active transport by kinesin-powered
molecular shuttles. Nano Lett, 5, 1337-1342 (2005)
3. van den Heuvel MG. and Dekker C. Motor proteins at work for
nanotechnology. Science, 317, 333-6 (2007).
4 Yokokawa R. et al., Simultaneous and Bidirectional Transport of
Kinesin-Coated Microspheres and Dynein-Coated Microspheres on
Polarity-Oriented Microtubules. Biotechnol Bioeng, 101, 1-8 (2008).
5. Hiyama S. et al., Biomolecular-Motor-Based Nano- or Microscale
Particle Translocations on DNA Microarrays. Nano Lett, 9, 2407-2413 (2009)
</body> </html>

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}