Biomod/2011/TeamJapan/Tokyo/Project/Summery and outlooks
<html>
<style type="text/css">
/* ====================
主に全体に関わるCSS
==================== */
body {behavior: url(http://www.xs4all.nl/~peterned/htc/csshover3-source.htc);}
.clear {clear:both;}
body.mediawiki {
font-size: 14px;
background-color:#707070; background-position: center center; background-attachment: fixed; background-repeat: no-repeat; font-family: Calibri, Verdana, helvetica, sans-serif; }
h1 {
padding: 0px 20px 5px 20px;
font-size: 34px;
font-weight: bold;
}
h2 {
padding: 20px 20px 5px 20px;
font-size: 25px;
color: #0083eb;
text-decoration: none;
font-weight: bold;}
border: none;
h2 a {
color: #eb8300;
}
h3 {
padding: 20px 20px 5px 20px;
font-size: 20px;
color: #000;
font-decoration: none;
font-weight: bold;
}
h1.firstHeading {
display: none;
}
p { text-align: justify; } a:link { color: #00a5ea; text-decoration: none } a:visited { color:#00a5ea; text-decoration: none } a:hover {
color: #eb8300;
text-decoration: none } a:active { color:#f29400; text-decoration: none } #bodyContent {
width: 970px;
margin: 0px 0px 0px;
background-color:#ffffff;
border-width: 0px 1px 0px 1px;
border-color: #000000;
}
#content {
padding-left: 0px; width: 970px;
}
table#team_members {
text-align: justify;
border: 0;
}
table#team_members h2, table#team_members h3 {
clear: both;
}
#content * a:hover {
text-decoration:none;
}
#main_wrapper {
position:absolute;
left:0px;
top:20px;
margin-top: 0; width: 969px; height: 221px; align: center; border-style: solid;
border-color: white;
} /* ====================
メニューの画像を変更できる部分 ==================== */
#header {
position:relative;
left:0px;
top:0px;
margin-top: 0; width: 969px; height: 221px; align: left; background-color: #FFFFFF;
background-image: url(http://openwetware.org/images/e/e0/NEW_header.jpg);
} /* ====================
以下、特殊なclassに適用される ==================== */
#navigation { position:absolute;
left:18px; top:155px; width:1200px; height:69px;
z-index:100;
background-color: transparent;
float: left;
color: #0000FF; } #super_main_wrapper {
position:absolute;
left:0px;
top:227px;
width: 975px; align: center; background-color: #ede8e2;
heigth: auto;
}
#SubWrapper {
width: 645px;
padding: 0px;
border-left:4px solid #ede8e2;
float: left;
margin-top: 0px;
background-color: #ede8e2;
}
#SubWrapper * p, #SubWrapper p {
padding: 0 20px;
text-align: justify;
font-size: 12px;
}
#SubWrapper * h3, #SubWrapper h3 {
padding-top: 10px;
font-size: 18px;
}
#news {
width: 322px;
margin-top: 0px;
float: left;
background-color: #d8d5d0;
border-right:4px solid #ede8e2;
}
#news p {
padding: 0 20px 20px 20px;
text-align: justify;
font-size: 12px;
}
#news h3 {
padding: 10px 20px;
font-size: 18px;
}
#mission_box {
width:650px;
float: left;
}
#team_box, #heartbeat_box, #notebook_box, #parts_box, #gallery_box, #sponsors_box, .boxy {
width:215px;
float: left;
padding: 10px 0 0 0;
}
div.tleft {
border-width: 0px;
margin:0;
padding:0;
border-color:transparent;
}
/* ====================
ここからプルダウン周辺のデザイン ==================== */
- menu * {
margin: 0; padding: 0; }
- menu {
behavior: url(http://www.xs4all.nl/~peterned/htc/csshover3-source.htc); font-family: calibri, verdana, sans-serif;
font-color: #ffffff;
font-size: 19px; background-color: transparent; float:left; padding: 12px 0 0 0; }
- menu ul {
float: left; list-style: none; }
- menu ul li {
background-color:transparent;
position:relative;
float:left; list-style: none; padding: 10px 20px 0 0;
font-weight: bold;
width: auto;
}
- menu a {
color: #FFFFFF; display: inline; text-decoration: none; }
- menu a:visited {
color:#FFFFFF; text-decoration: none }
- menu a:hover {
color: #00a5ea; }
- menu ul li ul {
display: none; position: absolute; left: 0px;
width: 155px;
heigth: 1%;
font-size: 19px; opacity: 0.8; list-style: none;
top: 30px;
padding-top: 20px;
z-index:500;
}
- menu ul li:hover ul {
display: inline;
background-position: bottom;
}
- menu ul li ul li {
width: 100%; list-style: none;
background-color: #000;
margin: -1px;
padding: 0px 0 0 5px;
display: inline;
}
</style>
<script type="text/javascript">
/***********************************************
- CSS Vertical List Menu- by JavaScript Kit (www.javascriptkit.com)
- Menu interface credits: http://www.dynamicdrive.com/style/csslibrary/item/glossy-vertical-menu/
- This notice must stay intact for usage
- Visit JavaScript Kit at http://www.javascriptkit.com/ for this script and 100s more
- /
var menuids=new Array("verticalmenu") //Enter id(s) of UL menus, separated by commas var submenuoffset=-2 //Offset of submenus from main menu. Default is -2 pixels.
function createcssmenu(){ for (var i=0; i<menuids.length; i++){
var ultags=document.getElementById(menuids[i]).getElementsByTagName("ul")
for (var t=0; t<ultags.length; t++){
var spanref=document.createElement("span")
spanref.className="arrowdiv" spanref.innerHTML=" " ultags[t].parentNode.getElementsByTagName("a")[0].appendChild(spanref)
ultags[t].parentNode.onmouseover=function(){
this.getElementsByTagName("ul")[0].style.left=this.parentNode.offsetWidth+submenuoffset+"px"
this.getElementsByTagName("ul")[0].style.display="block"
}
ultags[t].parentNode.onmouseout=function(){
this.getElementsByTagName("ul")[0].style.display="none"
}
}
}
}
if (window.addEventListener)
window.addEventListener("load", createcssmenu, false)
else if (window.attachEvent)
window.attachEvent("onload", createcssmenu)
</script>
</html>
Summery and outlooks
- We summarize this project’s results. In this project, we developed three devices and tried to confirm DNA ciliate’s three modes.
- To make devices, we made DNA devices: deoxyribozyne for DNA ciliate, complimentary DNA for deoxyribozyme, substrate for this deoxyribozyme, UV-switching-DNA, and blocking DNA. We made these devices to be the best for experimentation.
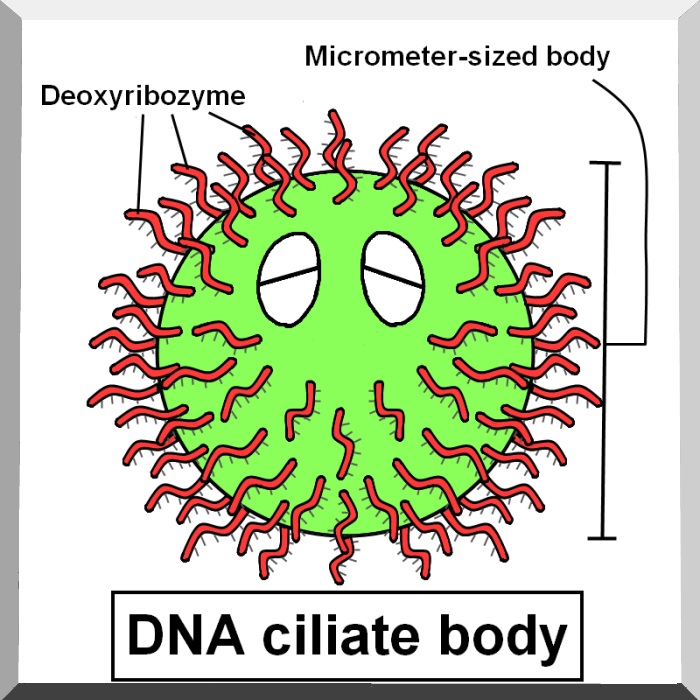
We developed three devices: DNA ciliate, DNA tracks, and DNA devices.
| <html><body><a href="http://openwetware.org/wiki/Biomod/2011/TeamJapan/Tokyo/Project/DNA_ciliate's_body"><img src="http://openwetware.org/images/8/8c/DNA_ciliate_body.jpg" border=0 width=200 height=200></a></body></html> |
|
| <html><body> <a href="http://openwetware.org/wiki/Biomod/2011/TeamJapan/Tokyo/Project/DNA_tracks"><img src="http://openwetware.org/images/f/f6/Micrometer_sized_track.jpg" border=0 width=200 height=200></a></body></html> |
|
| <html><body>
<a href="http://openwetware.org/wiki/Biomod/2011/TeamJapan/Tokyo/Project/UV_switch"><img src="http://openwetware.org/images/b/b5/DNA_devices.jpg" border=0 width=200 height=200></a> </body></html> |
|
We tried to confirm three modes: free moving mode, track walking mode, UV-switching mode.
| <html><body>
<a href="http://openwetware.org/wiki/Biomod/2011/TeamJapan/Tokyo/Project/Free_moving_mode"><img src="http://openwetware.org/images/f/f8/Biomod2011_Team_Tokyo111028FreeMovingMode.png" border=0 height=200></a> </body></html> |
|
| <html><body>
<a href="http://openwetware.org/wiki/Biomod/2011/TeamJapan/Tokyo/Project/Track_walking_mode"><img src="http://openwetware.org/images/b/bc/Biomod2011_Team_Tokyo111028TrackWalkingMode.png" border=0 height=200></a> </body></html> |
|
- Third mode is light-irradiated gathering mode. To achieve this mode, we designed UV-switching system, confirmed UV-switching system, and confirmed DNA ciliates’ gathering. Firstly, we designed UV-switching system. In this system, UV-switching-DNA and complimentary DNA for deoxyribozyme are used. This UV-switching system is completely original. Secondary, we confirmed UV-switching system by electrophoresis. UV-switching-DNA’s loop is fragile, so . Thirdly, we confirmed DNA ciliates’ gathering by using ----
- Through our experimentation, we made micrometer-sized DNA robot: DNA ciliate body, DNA tracks, and UV-switching system. We submit these three devices.
Followings experiments and expected results are our project’s outlook.- First is observing DNA ciliate’s movement on DNA track. By this observation, DNA ciliate’s real movement on DNA track will be confirmed.
- Second is making narrow DNA track enough to DNA ciliate move directly. In our simulation, we supposed the width of DNA track was 5 um, but the width of DNA track we actual made was 50 um. The movement of DNA ciliate depends on the width of DNA track, so making much narrower microchannel to observe DNA ciliate’s directly movement is needed. By using photolithography, we would make narrower microchannel and DNA track, but we couldn’t it because we didn’t know about photolithography in detail.
- If these two things are done, the track walking mode will be accomplished.
- Third is observing the function of OFF state in UV-switching system (Link:UV-switching trap DNA ). To check whether UV-switching-DNA works as we thought, it’s necessary to not only check the function of ON state but also check the function of OFF state. We checked the function of ON state by using complimentary DNA for deoxyribozyme, but we didn’t check the function of OFF state. If we Attach OFF state UV-switching-DNA or complimentary DNA for blocking DNA on a glass plate, we will check whether OFF state UV-switching-DNA works as we thought.
- If this thing is done, the UV-irradiated-gathering mode will be accomplished.
- By these three things, three modes are all accomplished.
- Forth is making UV-switching system which is able to switch ON state to OFF state. The UV-switching-DNA which we made is very reasonable and the switching is speedy because this DNA needs only two azobenzenes. However, this DNA can’t switch ON state to OFF state because this DNA hybridizes with deoxyribozyme in UV, but this DNA can’t hybridize blocking DNA by branch migration in no UV. This opened loop doesn’t close because the loop is fragile and the power to release deoxyribozyme is none.
- If we could perfect UV-switching-DNA, we could change three modes.
- Fifth is making system of mode changing. Free moving mode and track walking mode can be changed by temperature. If the temperature is lower than Tm, deoxyribozyme of DNA ciliate hybridizes with substrate and DNA ciliate becomes track walking mode. On the other hand, if the temperature is upper than Tm, deoxyribozyme of DNA ciliate release substrate and DNA ciliate becomes free moving mode. If UV-switching-system is changeable ON state to OFF state, light-irradiated-gathering mode and the other two modes can changed by switching on UV or switching off UV. If UV is spotted, UV-switching-gathering DNA hybridizes with deoxyribozyme of DNA ciliate, and DNA ciliate becomes light-irradiated-gathering mode. If UV is NOT spotted, UV-switching-gathering DNA hybridizes with blocking DNA, and DNA ciliate becomes one of the other two modes. By observing these changing modes, it’s confirmed that DNA ciliate is the mode changing molecular robot.
- If these five experimentations and creating are successful, DNA ciliate becomes more perfectly switching modes in response to external environment.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}