IGEM:IMPERIAL/2008/New/Motility/Motility data collection
<html> <style type="text/css"> .firstHeading {display: none;} </style> </html> <html> <style type="text/css">
table.calendar { margin:0; padding:2px; }
table.calendar td { margin:0; padding:1px; vertical-align:top; } table.month .heading td { padding:1px; background-color:#FFFFFF; text-align:center; font-size:120%; font-weight:bold; } table.month .dow td { text-align:center; font-size:110%; } table.month td.today { background-color:#3366FF } table.month td {
border:2px; margin:0; padding:0pt 1.5pt; font-size:8pt; text-align:right; background-color:#FFFFFF; }
- bodyContent table.month a { background:none; padding:0 }
.day-active { font-weight:bold; } .day-empty { color:black; } </style> </html>
| <html><script language="JavaScript">
var timeout = 250; var closetimer = 0; var ddmenuitem = 0; // open hidden layer function mopen(id) { // cancel close timer mcancelclosetime(); // close old layer if(ddmenuitem) ddmenuitem.style.visibility = 'hidden'; // get new layer and show it ddmenuitem = document.getElementById(id); ddmenuitem.style.visibility = 'visible'; } // close showed layer function mclose() { if(ddmenuitem) ddmenuitem.style.visibility = 'hidden'; } // go close timer function mclosetime() { closetimer = window.setTimeout(mclose, timeout); } // cancel close timer function mcancelclosetime() { if(closetimer) { window.clearTimeout(closetimer); closetimer = null; } } // close layer when click-out //document.onclick = mclose; </script> | |||||||||||||||
| <html><style type="text/css">
div.Section { font:11pt/16pt Calibri, Verdana, Arial, Geneva, sans-serif; background-image: url(http://openwetware.org/images/a/a0/Background.PNG); background-size: 100%; background-origin: content; } /* Text (paragraphs) */ div.Section p { font:11pt/16pt Calibri, Verdana, Arial, Geneva, sans-serif; text-align:justify; margin-top:0px; margin-left:30px; margin-right:30px; } /* Headings */ div.Section h1 { font:22pt Calibri, Verdana, Arial, Geneva, sans-serif; text-align:left; color:#3366FF; font-weight:bold; } /* Subheadings */ div.Section h2 { font:18pt Calibri, Verdana, Arial, Geneva, sans-serif; color:#3366FF; margin-left:5px; font-weight:bold; } /* Subsubheadings */ div.Section h3 { font:22pt Calibri, Verdana, Arial, sans-serif; color:#E5EBFF; margin-left:10px; font-weight:bold; } /* Subsubsubheadings */ div.Section h4 { font:22pt Calibri, Verdana, Arial, sans-serif; color:#2B48B3; margin-left:10px; font-weight:bold; } /* Subsubsubsubheadings */ div.Section h5 { font:12pt Calibri, Verdana, Arial, sans-serif; color:#3366FF; margin-left:20px; } /* References */ div.Section h6 { font:12pt Calibri, Verdana, Arial, sans-serif; font-weight:bold; font-style:italic; color:#3366FF; margin-left:25px; } /* Hyperlinks */ div.Section a { } div.Section a:hover { } /* Tables */ div.Section td { font:11pt/16pt Calibri, Verdana, Arial, Geneva, sans-serif; text-align:justify; vertical-align:top; padding:2px 4px 2px 4px; } /* Lists */ div.Section li { font:11pt/16pt Calibri, Verdana, Arial, Geneva, sans-serif; text-align:left; margin-top:0px; margin-left:30px; margin-right:0px; } /* TOC stuff */ table.toc { margin-left:10px; } table.toc li { font: 11pt/16pt Calibri, Verdana, Arial, Geneva, sans-serif; text-align: justify; margin-top: 0px; margin-left:2px; margin-right:2px; } /* [edit] links */ span.editsection { color:#BBBBBB; font-size:10pt; font-weight:normal; font-style:normal; vertical-align:bottom; } span.editsection a { color:#BBBBBB; font-size:10pt; font-weight:normal; font-style:normal; vertical-align:bottom; } span.editsection a:hover { color:#3366FF; font-size:10pt; font-weight:normal; font-style:normal; vertical-align:bottom; } /* Drop-down Menu */
margin: 0; padding: 0; z-index: 30 margin: 0; padding: 0; float: center; font: bold 12pt Calibri, Verdana, Arial, Geneva, sans-serif; border: 0px; list-style: none; }
display: block; margin: 0px 0px 0px 0px; padding: 0 0 12px 0; color: #FFFFFF; text-align: center; text-decoration: none; }
border: 0px }
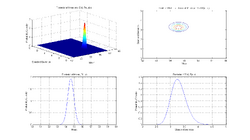
position: absolute; visibility: hidden; margin: 0; padding: 0; background: #66aadd; border: 1px solid #66aadd } #sddm div a { position: relative; left: 0; display: block; margin: 0; padding: 5px 10px; width: auto; white-space: nowrap; text-align: left; text-decoration: none; background: #FFFFFF; color: #2875DE; font: 11pt Calibri, Verdana, Arial, Geneva, sans-serif } #sddm div a:hover { background: #66aadd; color: #FFFFFF } </style></html> Motility Data AcquisitionUsing manual tracking we hope to acquire sufficient data to obtain B. Subtilis motility properties such as run velocity, run duration, tumbling angle and tumbling duration. This is done by first tracking cells and obtaining coordinate points, and from these points extracting out the above mentioned motility characteristics. The next phase would be to study the statistical distribution of these various properties, and compare them to our own statistical models of B.Subtilis motility. Our approach to collecting motility data is shown in the figure below:  MaterialsWe will be using the Zeiss Axiovert 200 inverted microscope with a fully motorised stage, controlled by Improvision Volocity acquisition software. This system offers a full incubation chamber with temperature and CO2 control, a large range of filter sets from UV to far-red and a highly sensitive 1300x1000 pixel camera for fast low-light imaging. Video images are captured into memory by the system at a basal video frame rate of 16.3Hz. This can be further increased by performing binning. MethodIt was concluded from the validation of tracking software that manual tracking provides for the most reliable form of tracking. We intend to use manual tracking to track B.Subtilis and extract two-dimensional coordinate data points which is described by the trajectory of the cells. Data ExtractionWe will input coordinate points obtained into algorithms to extract motility properties such as run velocity, run duration, tumbling angle and tumbling duration. Errors associated with our data extraction algorithm will also be assessed using synthetic videos. Once motility data extraction is complete, we may go on to model the motility of B.Subtilis. Algorithm Error AnalysisSynthetic data was used as an input to assess the errors associated with our algorithm used to extract run velocity, run duration, tumbling angle and tumbling duration from two-dimensional coordinate data. The data extracted from the algorithm used is then fitted with models used to construct the bacteria's trajectory. Errors associated with the model's parameters are then determined. The following assumptions were made:
Synthetic trajectory was constructed using the following parameters:
<html>
|

{kind=link}