|
|
| Line 121: |
Line 121: |
| <div class="slide"> | | <div class="slide"> |
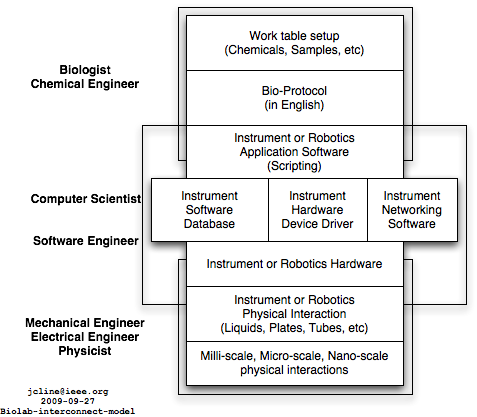
| =jcline@ieee.org - Robotics - User/Software/Hardware Model= | | =jcline@ieee.org - Robotics - User/Software/Hardware Model= |
|
| |
|
| |
| </div>
| |
|
| |
|
| |
| <div>
| |
| =jcline@ieee.org - Robotics - Data Format=
| |
|
| |
| * Data formats are very important
| |
| ** Make the data usable today
| |
| ** Make the data editable today
| |
| ** Make the data survive into the future; no obtuse or ridiculously hard to learn format
| |
| ** Make the data ''sharable''
| |
| * Computer scientists love inventing data formats
| |
| ** Leading to the problem of... too much complexity
| |
| * Vendors love inventing data formats
| |
| ** Leading to the problem of... patent / proprietary lockup
| |
| * Open formats are important for innovation and scalability leveraging Long Tail
| |
| ** ''Long Tail'' means a bunch of work is done today, and numerous incremental improvements occur by many people over decades..
| |
| *** vs. single product lifetime of vendor's software and then the data is lost or the data format is unusable
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org - Robotics - Data Format=
| |
|
| |
| ===One way (Wrong)===
| |
| * W3C Recommendations for speech grammars and semantic interpretation
| |
| <code>
| |
| <rule id="order">
| |
| <tag>var index=0; out.pizza = new Array();</tag>
| |
| <item repeat="0-1"><ruleref uri="#start"/></item>
| |
| <item>
| |
| <ruleref uri="#pizza"/>
| |
| <tag>out.pizza[index]=$pizza; index+=1;</tag>
| |
| </item>
| |
| <item repeat="0-">
| |
| <item><token>and</token></item>
| |
| <item>
| |
| <ruleref uri="#pizza"/>
| |
| <tag>out.pizza[index]=$pizza; index+=1;</tag>
| |
| </item>
| |
| </item>
| |
| <item repeat="0-1"><ruleref uri="#stop"/></item>
| |
| </rule>
| |
| </code>
| |
| ** Much too difficult to edit this
| |
| ** Much too difficult to read this
| |
| ** Much too difficult to learn this
| |
| *** XML, HTML, anything that ugly, is a Bad Idea
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Data Format=
| |
| * W3C Recommendations for speech grammars and semantic interpretation
| |
| ** Computer Scientist response: ''"Oh, but we can simplify that"''
| |
|
| |
| <code>
| |
| <emma:interpretation>
| |
| <pizza>
| |
| <number>1</number>
| |
| <size>medium</size>
| |
| <type>pepperoni</type>
| |
| </pizza>
| |
| <pizza>
| |
| <number>1</number>
| |
| <size>large</size>
| |
| <type>cheese</type>
| |
| <topping>sausage</topping>
| |
| <topping>onions</topping>
| |
| </pizza>
| |
| </emma:interpretation>
| |
| </code>
| |
| ** Still Much too difficult to edit this
| |
| ** Still Much too difficult to read this
| |
| ** Still Much too difficult to learn this
| |
| ** Now needs extra files to describe the custom format
| |
| *** '''Still a Bad Idea'''
| |
| </div>
| |
|
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Data Format - Device data=
| |
|
| |
|
| |
| *Each device has data associated with operating it.
| |
| *Storing that data in an easily readable and editable format is very important for software re-use.
| |
| * YAML Format is Human readable, Human editable and Computer Readable
| |
| * YAML allows references to prior definitions and either simple or complex assignments
| |
| <pre>
| |
| %YAML 1.1
| |
| --- # Fialab-Microsia
| |
| address:
| |
| syringe: A
| |
| valve: C
| |
| peristaltic: D
| |
| external: B
| |
| valve:
| |
| send: # delay after cmds 100ms - 1 sec
| |
| NP_SET:
| |
| desc: set number of physical ports
| |
| opcode: NP
| |
| args:
| |
| - 1
| |
| - numport:4-12
| |
| redundancy: 2 # send cmd twice
| |
| delay: 100 # ms
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| NP_GET:
| |
| desc: get number of physical ports
| |
| opcode: NP
| |
| args:
| |
| - 0
| |
| redundancy: 2 # send cmd twice
| |
| delay: 100 # ms
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| peristaltic:
| |
| send: # delay after cmds 100ms - 1 sec
| |
| SET_SPEED:
| |
| desc: set pump speed
| |
| opcode: G
| |
| args:
| |
| - 1
| |
| - speed:0-100
| |
| delay: 100
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| SET_DIRECTION:
| |
| desc: set pump direction, direction:1=counterclockwise or 2=clockwise
| |
| opcode: W
| |
| args:
| |
| - 1
| |
| - direction:1-2:default=1
| |
| delay: 5000
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| syringe:
| |
| send: # delay after cmds 100ms - 1 sec
| |
| INIT_ALL:
| |
| desc: init all (both) pumps
| |
| opcode: _Z0R
| |
| args:
| |
| - 0
| |
| delay: 100
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| SET_INPUT:
| |
| desc: position valve in for given pump
| |
| opcode: /$1IR
| |
| args:
| |
| - 1
| |
| - pumpnum:1-2:default=1
| |
| delay: 100
| |
| recv:
| |
| ok: ~
| |
| err: ~
| |
| </pre>
| |
| * Made to be readable and editable
| |
| * Made to be scalable
| |
| * Contains all definitions of a device's operation
| |
| * [http://yaml.org YAML] is Best current practice for readable data format
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Data Format - Environmental data=
| |
|
| |
|
| |
| *Each device has environment data associated with operating it.
| |
| ** Points in space
| |
| ** Containers
| |
| ** Solids, liquids, gases
| |
| *Storing that data in an easily readable and editable format is very important for software re-use.
| |
| * YAML Format is Human readable, Human editable and Computer Readable
| |
|
| |
| <pre>
| |
| %YAML 1.1
| |
| ---
| |
| version: 2009-09-04
| |
| tecan:
| |
| genesis:
| |
| points:
| |
| roma0:
| |
| magnet-hover: '14056,1850,980,1800'
| |
| magnet-place: '14056,1850,687,1800'
| |
| sampletray-hover: '14057,2828,980,1800'
| |
| sampletray-place: '14057,2828,582,1800'
| |
| shaker-hover: '1780,3569,1535,1800'
| |
| shaker-put: '1780,3569,865,1800'
| |
| shaker-take: '1780,3569,865,1800'
| |
| shakerlock-1: '1762,1177,1535,900'
| |
| shakerlock-2: '1762,1177,815,900'
| |
| shakerlock-3: '1191,1177,808,900'
| |
| shakerlock-4: '1762,1177,815,900'
| |
| shakerlock-5: '1762,1177,1535,900'
| |
| shakerlock-6: '1780,3569,1535,1800'
| |
| shakerlock-hover: '1780,3569,1535,1800'
| |
| HOME1: '11165,2525,980,1800'
| |
|
| |
| ...
| |
| </pre>
| |
|
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - What's Running Now=
| |
|
| |
| * General purpose software to control FIAlab syringe pump and 10-way valve
| |
| * General purpose software to control part of the Tecan arm
| |
| * Network operation of the Tecan; run a bio-protocol from your desk
| |
| ** Get the current operational status in real time
| |
| *'''That's not much, yet'''
| |
| * 2 releases already made to the public internet software archive for Perl (CPAN)
| |
|
| |
| The end user writes a simple Perl application to control all devices and robotics.
| |
| * Perl is '''the #1 bioinformatics language.'''
| |
|
| |
| <pre>
| |
| sub Main {
| |
| $hw = Robotics::Tecan->new(
| |
| connection => 'network,Robotics::Tecan::Genesis,genesis0',
| |
| token => 'M1',
| |
| serveraddr => 'heavybio.dyndns.org:8088',
| |
| password => $ENV{'TECANPASSWORD'});
| |
|
| |
| $hw->attach("o");
| |
| $_ = $hw->status();
| |
| exit -2 if !/IDLE/i;
| |
|
| |
| # Load worktable
| |
| $hw->configure("client-traymove1test.yaml");
| |
|
| |
| my @path = (
| |
| "shakerlock-hover",
| |
| "shakerlock-1",
| |
| "shakerlock-2",
| |
| "shakerlock-3",
| |
| "shakerlock-4",
| |
| "shakerlock-5",
| |
| "shakerlock-hover"
| |
| );
| |
| checkok $hw->move_path("roma0", @path);
| |
|
| |
| checkok $hw->move("roma0", "shaker-take");
| |
| checkok $hw->grip("roma0");
| |
| checkok $hw->move("roma0", "shaker-hover");
| |
|
| |
| checkok $hw->move("roma0", "sampletray-hover");
| |
| checkok $hw->move("roma0", "sampletray-place");
| |
| checkok $hw->grip("roma0", 'o', 120);
| |
| checkok $hw->move("roma0", "sampletray-hover");
| |
| checkok $hw->park("roma0");
| |
|
| |
| checkok $hw->park("liha");
| |
|
| |
| </pre>
| |
|
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - What's Running in "Upcoming Weeks"=
| |
|
| |
| * General purpose software to control FIAlab
| |
| * General purpose software to control Tecan arm & Tecan liquid handler & Tecan peripherals
| |
| * Network operation of all of the above; run a bio-protocol ''entire flow'' from your desk
| |
| ** And get the data results back from MATLAB in '''real time'''
| |
| * Advanced error handling for Tecan bio-protocol problems: automatic re-trying
| |
|
| |
| ===Medium Term Goal===
| |
|
| |
| * Get something simple working with the software framework.
| |
| ** Swap out the existing devices for smarter ones.
| |
| *** Far more versatile robotics devices are made every year by undergraduate '''mechatronics''' classes.
| |
|
| |
| ===Long Term Goal===
| |
|
| |
| * Run a complete bio-protocol ''using the English language''
| |
| ** '''Meaning, bio-latin-english'''
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Long List of Benefits=
| |
|
| |
| *Allows many devices to be controlled from the same user program
| |
| *Allows device operations not supported by the vendor
| |
| ** This includes much better error handling & re-trying
| |
| *Allows abstraction of the devices: swap out one device for another
| |
| **Removes vendor lock-in, creating more competitive forces to drive innovation among various devices
| |
| *Plug in new custom devices, can quickly operate with same user program
| |
| *Network operation
| |
| **The controller PC will miss fewer commands since vendor application does not take CPU time
| |
| **The user PC doesn't have to be Windows to run a device (many benefits there)
| |
| **The user can access device status and device output from anywhere (lab or home)
| |
| *The user can program complex algorithms using multiple devices, creating a control system with feedback to optimize a protocol or make arbitrary decisions
| |
| **The "Robot Scientist" was claimed to have identified new targets "on it's own" - using data feedback and prediction
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Protolexer=
| |
|
| |
| ==Let's Do Something "Simple" : Revisited==
| |
|
| |
| * Feed the protocol directly to the computer.
| |
| * Computers are smart enough.
| |
| * The computer knows what devices are attached or available on the network.
| |
| * '''Integrate''' the devices together into a long chain.
| |
| * Bio-protocols have fairly standardized formats and standardized language.
| |
| ** Or can be, with human editing of the English, and a human quickly verifying the "compiled" result before robotics operation.
| |
|
| |
| http://biosx.com/88proof/synthetic_biology/blog/wp-content/uploads/2009/06/protolexer1.png
| |
|
| |
| </div>
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Data Format - Bio-protocols=
| |
|
| |
|
| |
| <pre>
| |
| %YAML 1.1
| |
| ---
| |
| protocol: Mate-Paired Library Preparation for Sequencing
| |
| methods:
| |
| - &standard-purify purify with column:
| |
| - &cp1 Add 3 volumes of Buffer QG and 1 volume of isopropyl alcohol to the sheared
| |
| DNA. If the color of the mixture is orange or violet, add 10uL of 3M sodium
| |
| acetate, pH5.5 and mix. The color turns yellow. The pH required for efficient
| |
| adsorption of the DNA to the membrane is <= 7.5.
| |
|
| |
| - &cp2 Apply 750uL of sheared DNA in Buffer QG to the column(s). The maximum
| |
| amount of DNA that can be applied to a QIAquick column is 10ug. Use more
| |
| columns if necessary.
| |
|
| |
| - &cp3 Let the column(s) stand for 2 minutes at room temperature.
| |
|
| |
| - &cp4 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 1 minute, then discard
| |
| the flow-through.
| |
|
| |
| - &cp5 Repeat steps 2 and 4 until the entire sample has been loaded onto the column(s).
| |
| Place the QIAquick column(s) back into the same collection tube(s).
| |
|
| |
| - &cp6 Add 750uL of Buffer PE to wash the column(s).
| |
|
| |
| - &cp7 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 2 minutes, then discard
| |
| the flow-through. Repeat to remove residual wash buffer.
| |
|
| |
| - &cp8 Air-dry the column(s) for 2 minutes to evaporate any residual alcohol. Transfer
| |
| the column(s) to clean 1.5-mL LoBind tube(s).
| |
|
| |
| - &cp9 Add 30uL of Buffer EB to the column(s) to elute the DNA and let the column(s)
| |
| stand for 2minutes.
| |
|
| |
| - &cp10 Centrifuge the column(s) at >= 10,000g (13,000 rpm) for 1 minute.
| |
|
| |
| - &cp11 Repeat steps 9 and 10.
| |
|
| |
| - &cp12 If necessary, pool the eluted DNA.
| |
|
| |
| - &bead-purify purify with magbeads:
| |
| - &bp1 Add 100uL of DNA to 95uL of magbeads.
| |
|
| |
| - &bp2 Vortex at 1,000RPM for 1 minute.
| |
|
| |
| - &bp3 Incubate on magnets for 300 seconds at room temperature to allow DNA to
| |
| bind to beads and beads to settle.
| |
|
| |
| - &bp4 Remove supernatant while beads are magnetized.
| |
|
| |
| - &bp5 Elute while beads are magnetized using 100uL of EtOH.
| |
| Pause for 90 seconds during each wash to allow beads to settle.
| |
| Allow EtOH to evaporate until beads are dry and
| |
| cracks are visible in the bead surface.
| |
|
| |
| - &bp6 Resuspend with 15 uL Buffer xx to resuspend beads.
| |
|
| |
| - &bp7 Vortex at 1,000RPM for 20 seconds.
| |
|
| |
| - &bp8 Incubate for 200 seconds on magnets at room temperature.
| |
|
| |
| - &bp9 Save the eluted DNA.
| |
| </pre>
| |
| * Easy to edit (it's text with indenting)
| |
| * Easy to read (no crazy formatting words)
| |
| * Very easy to share
| |
| ** Standardized format
| |
| ** Self-contained, no extra files needed
| |
| * Mostly easy to learn
| |
| * Easy for computers to read, process, write, share
| |
| * Defined in YAML
| |
|
| |
|
| |
| </div>
| |
|
| |
|
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Competing Method: BioStream (MIT)=
| |
|
| |
| * "Towards a High-Level Programming Language for Standardizing and Automating Biology Protocols"
| |
| **"Abstraction Layers for Scalable Micro¿uidic Biocomputers", William Thies1 , John Paul Urbanski2 , Todd Thorsen2 , and Saman Amarasinghe, Computer Science and Arti¿cial Intelligence Laboratory, Hatsopoulos Micro¿uids Laboratory, Massachusetts Institute of Technology, {thies, urbanski, thorsen, saman}@mit.edu
| |
|
| |
| ** Defines "high level" (like Java/C++) language for describing protocols
| |
| ** Can take some standardized English protocols as input
| |
| ** Can automatically generate the "high level language" for the computer
| |
| ** Can output a human-readable clean English bio-protocol
| |
| *** This is a "Validated-clean" version of original bio-protocol
| |
|
| |
| ===BioStream "clean English output" for '''[http://openwetware.org/wiki/DNA_extraction_from_tissue '''DNA extraction from tissue protocol]'''===
| |
|
| |
| http://88proof.com/biotech/img/Biostream-DNA%20extraction%20from%20tissue%20protocol-English-Output.png
| |
|
| |
| </div>
| |
|
| |
| <div class="slide">
| |
| =jcline@ieee.org Robotics - Competing Method: BioStream (MIT)=
| |
|
| |
| * "Towards a High-Level Programming Language for Standardizing and Automating Biology Protocols"
| |
|
| |
| ===BioStream "high level language" for '''[http://openwetware.org/wiki/DNA_extraction_from_tissue '''DNA extraction from tissue protocol]'''===
| |
|
| |
| http://88proof.com/biotech/img/Biostream-DNA%20extraction%20from%20tissue%20protocol-Source-Output.png
| |
|
| |
|
|
| |
|
| </div> | | </div> |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}